隐式3D形状表示:Occupancy Networks
OccNet 的关键思想是隐式地表示3D形状,而不是显式地表示。与直接编码形状几何信息不同,OccNet 将形状的表面建模为非线性分类器的决策边界。
隐式表示:Occupancy Networks 将 3D 形状表示为非线性分类器函数的决策边界
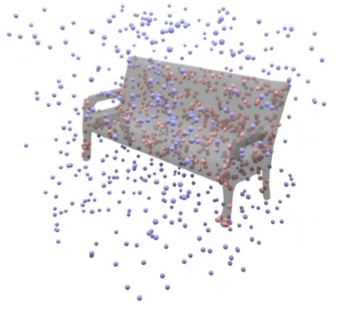
这里, 表示输入空间(例如,体素网格或点云),函数在给定点的输出表示该点的是否占用(该点在物体内部还是外部,下图中即红色在内部,蓝色在外部)
1 数据集准备
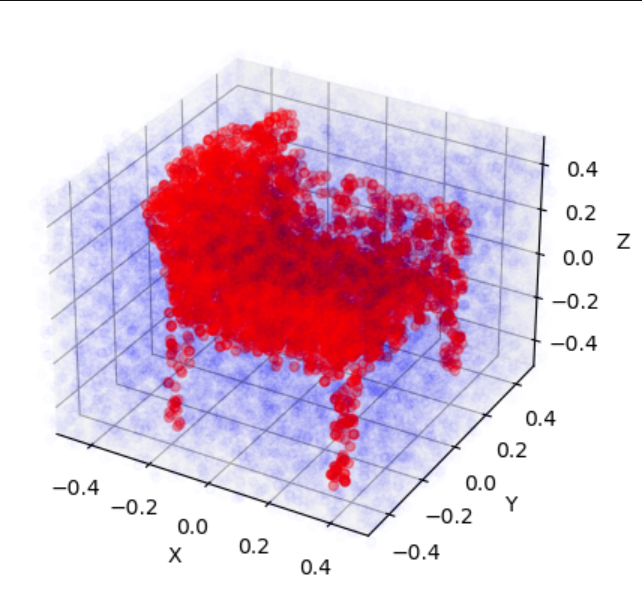
首先我们导入训练数据,即我们想要表示的 3D 对象,其包含 100k 个采样点及其占用值。占用值指示该点是属于对象 ( occupancy=1 ) 还是不属于 ( occupancy=0 )
我们首先需要将数据分为训练集和验证集。随机分割数据,使用 80% 作为训练集,20% 作为验证集。
2 创建神经网络
这个神经网络即为一个分类器,其传入的3维的坐标,输出1维的占用值0/1。简单设计为具有 4 个隐藏层,隐藏维度为 64 的网络(总共 6 层,4 个隐藏层 + 1 个输入 + 1 个输出)
class OccNet(nn.Module):
def __init__(self, size_h=64, n_hidden=4):
super().__init__()
# 4 个隐藏层,隐藏维度为 64(总共 6 层,4 个隐藏层 + 1 个输入 + 1 个输出)
layers = [nn.Linear(3, size_h), nn.ReLU()]
for _ in range(n_hidden):
layers += [nn.Linear(size_h, size_h), nn.ReLU()]
layers += [nn.Linear(size_h, 1)]
self.main = nn.Sequential(*layers)
def forward(self, pts):
return self.main(pts).squeeze(-1) # squeeze dimension of the single output value然后我们定义损失函数、优化器:
损失函数 (Loss Function):
nn.BCEWithLogitsLoss,二元交叉熵损失和 softmax 函数的结合。这个损失函数通常用于二分类问题;参数reduction='none'使损失在计算时不进行求和或平均,而是对每个样本点都会产生一个独立的损失值优化器 (Optimizer):
- 使用了 Adam 优化器,它是一种常用的随机梯度下降优化算法的变体。Adam 优化器具有自适应学习率的特性,可以在训练过程中根据梯度的不同情况来调整学习率。
model = OccNet(size_h=64, n_hidden=4)
criterion = nn.BCEWithLogitsLoss(reduction='none') # binary cross entropy loss + softmax
optimizer = torch.optim.Adam(model.parameters())3 训练
训练循环:
对于每个批次的采样点和占用值,将数据送入模型进行前向传播,计算输出和损失使用优化器清零梯度,并进行反向传播和权重更新
optimizer.zero_grad() # 清零梯度 output = model(pts) # 前向传播,通过模型计算预测值 loss = criterion(output, occ).mean() # 计算损失 loss.backward() # 反向传播,计算每个参数的梯度 optimizer.step() # 更新权重,使用梯度进行一步优化算法验证:
- 在每个 epoch 或每个指定的迭代次数后,使用验证集计算模型的验证损失
- 如果验证损失比之前记录的最佳验证损失还要小,则保存当前模型
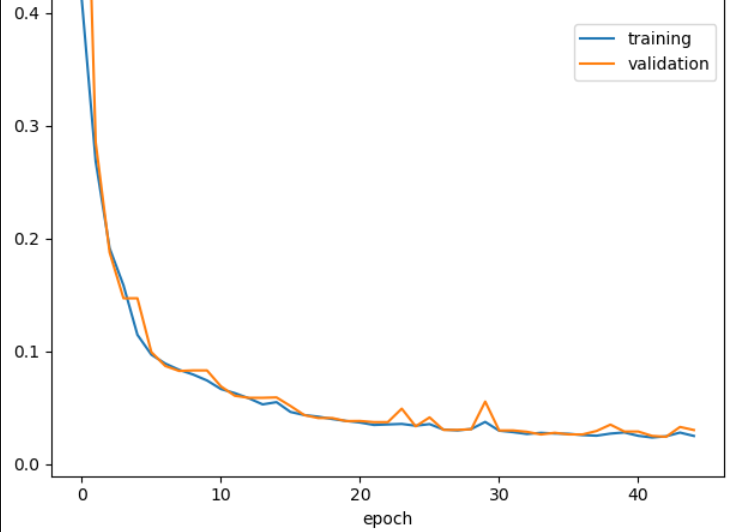
正常的训练loss曲线:
4 从隐式表示中提取对象
之前我们已经训练好了一个神经网络,现在需要使用经过训练的网络来恢复物体的 3D 形状。
采样点网格:首先,在三维空间内生成一组等间距采样点网格,这些点将用于评估网络的输出
参数
xmin、xmax和resolution,分别表示每个轴上的最小值、最大值和分辨率def make_grid(xmin, xmax, resolution): grid_1d = torch.linspace(xmin, xmax, resolution) grid_3d = torch.stack(torch.meshgrid(grid_1d, grid_1d, grid_1d, indexing='xy'), -1) return grid_3d.flatten(0, 2) # RxRxRx3 -> (R^3)x3例如:使用
resolution = 128设置每个维度上的分辨率为 128,即得到 128×128×128 的三维网格,共 个点预测占用值:将采样点输入经过训练的网络中,获取每个点处的占用值
网格生成:基于占用值,使用网格生成算法(如 Marching Cubes)生成三维网格,该网格将近似地表示原始的 3D 形状