6 OpenGL 流体模拟
流体模拟——数值解法求解Navier-Stokes方程模拟二维流体
源码见GitHub:A-UESTCer-s-Code
1 实现效果
最终的实现效果如下:
2 实现过程
2.1 流体模拟实现
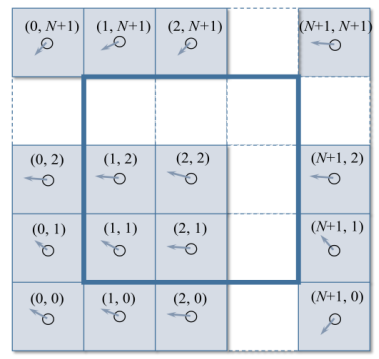
2.1.1 网格结构
在流体模拟中,使用一个 的网格来表示流体的运动和属性。每个网格单元中心定义了该网格内的流体速度场(水平和垂直速度分量)以及密度值。网格的最外层用于表示边界条件,以便模拟封闭盒子内的流体流动。
2.1.2 数据结构
Stam 定义了两个大小为 的数组来存储网格中流体的速度场和密度值。为了提高计算效率,数据以一维数组的形式存储。具体定义如下:
static float *u, *v, *u_prev, *v_prev;
static float *dens, *dens_prev;其中:
u和v是指向一维数组的指针,分别存储当前速度场的 x 方向和 y 方向分量值。u_prev和v_prev是指向一维数组的指针,分别存储前一时刻的速度场分量值。dens是指向一维数组的指针,存储当前时刻的密度值。dens_prev是指向一维数组的指针,存储前一时刻的密度值。
为了分配所需要的内存空间,定义了如下函数 allocate_data:
static int allocate_data (void) {
int size = (N + 2) * (N + 2);
u = (float *) malloc(size * sizeof(float));
v = (float *) malloc(size * sizeof(float));
u_prev = (float *) malloc(size * sizeof(float));
v_prev = (float *) malloc(size * sizeof(float));
dens = (float *) malloc(size * sizeof(float));
dens_prev = (float *) malloc(size * sizeof(float));
if (!u || !v || !u_prev || !v_prev || !dens || !dens_prev) {
fprintf(stderr, "Cannot allocate data\n");
return 0;
}
return 1;
}size = (N + 2) * (N + 2);:计算数组的大小。N是数组的维度,+2是为了在数组的边界添加额外的空间。u、v、u_prev、v_prev、dens和dens_prev:这些都是浮点数数组,用malloc函数分配内存。每个数组的大小都是size * sizeof(float),即数组元素数量乘以每个元素的大小。barrier:这是一个整数数组,用malloc函数分配内存。数组的大小是(N + 2) * (N + 2) * sizeof(int)。if (!u || !v || !u_prev || !v_prev || !dens || !dens_prev):这是一个错误检查。如果任何一个malloc调用失败,它会返回NULL,这个if语句就会成立。如果成立,它会打印一条错误消息,并返回0表示失败。return (1);:如果所有的malloc调用都成功,函数就会返回1表示成功。
这个函数分配了存储当前和之前时刻速度场和密度值的空间,并检查每个指针是否分配成功。如果有任何一个指针分配失败,函数会输出错误信息并返回 0。
为了方便根据索引值读取数组中的元素,它用于计算二维数组在一维数组中的索引。定义了如下宏:
#define IX(i, j) ((i) + (N + 2) * (j))在这个宏中,i和j是二维数组的行和列索引,N+2是二维数组的列数。所以,IX(i,j)的结果是i + (N+2)*j,这是一个常见的将二维数组索引转换为一维数组索引的公式。
例如:为了读取当前时刻第 i 行和第 j 列的网格(i, j)中速度场的 x 方向分量值,可以简单地通过 u[IX(i, j)] 进行访问。
2.1.3 程序结构
程序的主要结构如下。首先,通过 get_from_UI 函数利用用户点击鼠标的信息来初始化密度值和速度场,然后通过 vel_step 和 dens_step 函数更新速度场与密度的状态,最后绘制密度。
static void idle_func (void) {
get_from_UI(dens_prev, u_prev, v_prev);
vel_step(N, u, v, u_prev, v_prev, visc, dt);
dens_step(N, dens, dens_prev, u, v, diff, dt);
// 其他代码
}1) 更新速度场
更新速度场的程序框架如图所示。每个时间步需要计算外力项,然后计算扩散项和平流项。具体实现通过 vel_step 函数完成:
void vel_step(int N, float *u, float *v, float *u0, float *v0, float visc, float dt) {
add_source(N, u, u0, dt);
add_source(N, v, v0, dt);
SWAP(u0, u);
diffuse(N, 1, u, u0, visc, dt);
SWAP(v0, v);
diffuse(N, 2, v, v0, visc, dt);
project(N, u, v, u0, v0);
SWAP(u0, u);
SWAP(v0, v);
advect(N, 1, u, u0, u0, v0, dt);
advect(N, 2, v, v0, u0, v0, dt);
project(N, u, v, u0, v0);
}外力添加:
add_source 函数实现了外力的添加:
void add_source(int N, float *x, float *s, float dt) {
int i, size = (N + 2) * (N + 2);
for (i = 0; i < size; i++) {
x[i] += dt * s[i];
}
}完成外力添加后,需要交换速度场两个分量 u0、u 和 v0、v 的数值。SWAP 是一个宏定义,用于交换两个数组的指针:
#define SWAP(x0, x) {float *tmp = x0; x0 = x; x = tmp;}扩散项计算:
接下来计算扩散项,扩散系数保存在变量 diff 中。根据公式,网格 (i, j) 中速度场与周围相邻的四个网格相关。假设整个网格长度为 1,每个网格长度为 1/N,那么 a = dt * diff * N * N。扩散项由 diffuse 函数实现:
void diffuse(int N, int b, float *x, float *x0, float diff, float dt) {
float a = dt * diff * N * N;
lin_solve(N, b, x, x0, a, 1 + 4 * a);
}lin_solve 函数实现 Poisson 方程求解:
void lin_solve(int N, int b, float *x, float *x0, float a, float c) {
int i, j, k;
for (k = 0; k < 20; k++) {
FOR_EACH_CELL
x[IX(i, j)] = (x0[IX(i, j)] + a * (x[IX(i - 1, j)] + x[IX(i + 1, j)] + x[IX(i, j - 1)] + x[IX(i, j + 1)])) / c;
END_FOR
set_bnd(N, b, x);
}
}FOR_EACH_CELL 和 END_FOR 是宏定义,用于遍历所有网格:
#define FOR_EACH_CELL for (i = 1; i <= N; i++) { for (j = 1; j <= N; j++) {
#define END_FOR }}set_bnd 函数用于设置边界条件,将在后面详细讲解。
平流项计算:
最后一步计算平流项,采用隐式积分法,逆时追踪粒子轨道,在新位置通过双线性插值求得平流项的值。具体实现如下:
void advect(int N, int b, float *d, float *d0, float *u, float *v, float dt) {
int i, j, i0, j0, i1, j1;
float x, y, s0, t0, s1, t1, dt0;
dt0 = dt * N;
FOR_EACH_CELL
x = i - dt0 * u[IX(i, j)];
y = j - dt0 * v[IX(i, j)];
if (x < 0.5f) x = 0.5f;
if (x > N + 0.5f) x = N + 0.5f;
i0 = (int)x;
i1 = i0 + 1;
if (y < 0.5f) y = 0.5f;
if (y > N + 0.5f) y = N + 0.5f;
j0 = (int)y;
j1 = j0 + 1;
s1 = x - i0;
s0 = 1 - s1;
t1 = y - j0;
t0 = 1 - t1;
d[IX(i, j)] = s0 * (t0 * d0[IX(i0, j0)] + t1 * d0[IX(i0, j1)]) +
s1 * (t0 * d0[IX(i1, j0)] + t1 * d0[IX(i1, j1)]);
END_FOR
set_bnd(N, b, d);
}完成了外力计算、扩散项计算以及平流项计算后,最后对结果进行投射。根据公式,投射由 project 函数实现:
void project(int N, float *u, float *v, float *p, float *div) {
int i, j;
FOR_EACH_CELL
div[IX(i, j)] = -0.5f * (u[IX(i + 1, j)] - u[IX(i - 1, j)] + v[IX(i, j + 1)] - v[IX(i, j - 1)]) / N;
p[IX(i, j)] = 0;
END_FOR
set_bnd(N, 0, div);
set_bnd(N, 0, p);
lin_solve(N, 0, p, div, 1, 4);
FOR_EACH_CELL
u[IX(i, j)] -= 0.5f * N * (p[IX(i + 1, j)] - p[IX(i - 1, j)]);
v[IX(i, j)] -= 0.5f * N * (p[IX(i, j + 1)] - p[IX(i, j - 1)]);
END_FOR
set_bnd(N, 1, u);
set_bnd(N, 2, v);
}在 project 函数中,再次调用了 lin_solve 函数求解 Poisson 压力方程,然后利用公式求解出散度为 0 的速度场。
vel_step 函数调用了两次 project 函数。这是因为如果能让速度场保持物质守恒,advect 函数计算结果将会更准确。
边界条件设置:

最后,更新边界处的速度场由 set_bnd 函数实现:
void set_bnd(int N, int b, float *x) {
int i;
for (i = 1; i <= N; i++) {
x[IX(0, i)] = b == 1 ? -x[IX(1, i)] : x[IX(1, i)];
x[IX(N + 1, i)] = b == 1 ? -x[IX(N, i)] : x[IX(N, i)];
x[IX(i, 0)] = b == 2 ? -x[IX(i, 1)] : x[IX(i, 1)];
x[IX(i, N + 1)] = b == 2 ? -x[IX(i, N)] : x[IX(i, N)];
}
x[IX(0, 0)] = 0.5f * (x[IX(1, 0)] + x[IX(0, 1)]);
x[IX(0, N + 1)] = 0.5f * (x[IX(1, N + 1)] + x[IX(0, N)]);
x[2) 更新密度值
根据密度更新方程 (6-32),密度更新流程的程序框架如下图所示。每个时间步需要计算新增加的密度值项,然后计算密度的扩散项以及密度随着速度场的移动。
密度更新基本架构:
具体实现通过 dens_step 函数完成:
void dens_step(int N, float *x, float *x0, float *u, float *v, float diff, float dt) {
add_source(N, x, x0, dt);
SWAP(x0, x);
diffuse(N, 0, x, x0, diff, dt);
SWAP(x0, x);
advect(N, 0, x, x0, u, v, dt);
}新增加密度值的计算:
计算新增加的密度值仍然由 add_source 函数实现。add_source 函数利用外部源对密度值进行修改,外部源密度存储在指针 x0 指向的数组中。
void add_source(int N, float *x, float *s, float dt) {
int i, size = (N + 2) * (N + 2);
for (i = 0; i < size; i++) {
x[i] += dt * s[i];
}
}密度扩散项的计算:
密度扩散项与速度场扩散项非常类似,通过 diffuse 函数模拟密度的扩散。密度扩散系数为 diff,当 diff > 0 时,密度将会扩散到周围。每个网格只与其周围直接相邻的四个网格交换密度。网格内密度值随着密度扩散至相邻网格而降低,随着相邻网格密度流入而增加。
void diffuse(int N, int b, float *x, float *x0, float diff, float dt) {
float a = dt * diff * N * N;
lin_solve(N, b, x, x0, a, 1 + 4 * a);
}密度平流项的计算:
密度平流项与速度场平流项类似,通过调用 advect 函数实现密度的对流项计算。
void advect(int N, int b, float *d, float *d0, float *u, float *v, float dt) {
int i, j, i0, j0, i1, j1;
float x, y, s0, t0, s1, t1, dt0;
dt0 = dt * N;
FOR_EACH_CELL
x = i - dt0 * u[IX(i, j)];
y = j - dt0 * v[IX(i, j)];
if (x < 0.5f) x = 0.5f;
if (x > N + 0.5f) x = N + 0.5f;
i0 = (int)x;
i1 = i0 + 1;
if (y < 0.5f) y = 0.5f;
if (y > N + 0.5f) y = N + 0.5f;
j0 = (int)y;
j1 = j0 + 1;
s1 = x - i0;
s0 = 1 - s1;
t1 = y - j0;
t0 = 1 - t1;
d[IX(i, j)] = s0 * (t0 * d0[IX(i0, j0)] + t1 * d0[IX(i0, j1)]) +
s1 * (t0 * d0[IX(i1, j0)] + t1 * d0[IX(i1, j1)]);
END_FOR
set_bnd(N, b, d);
}通过以上步骤,完成了新增加密度值的计算、密度的扩散以及密度的平流。整个密度更新流程与速度场的更新流程类似,确保了密度值在模拟过程中能够正确反映流体的运动特性。
2.1.4 实现效果
具体的实现效果如下:
2.2 颜色设置
颜色的设置主要出现在draw_density和get_from_UI两个函数中。先设置一个颜色的全局变量:
float currentColor[3] = { 1.0f, 1.0f, 1.0f }; // 默认为白色2.2.1 颜色绘制
在draw_density函数中,颜色的设置是基于密度dens和当前颜色currentColor的。对于每个顶点,它都会计算一个颜色值,这个颜色值是密度值和当前颜色的各分量的乘积。例如,d00 * currentColor[0]计算的是红色分量,d00 * currentColor[1]计算的是绿色分量,d00 * currentColor[2]计算的是蓝色分量。这样,颜色的强度会根据密度的大小变化。
glColor3f(d00 * currentColor[0], d00 * currentColor[1], d00 * currentColor[2]); glVertex2f(x, y);
glColor3f(d10 * currentColor[0], d10 * currentColor[1], d10 * currentColor[2]); glVertex2f(x + h, y);
glColor3f(d11 * currentColor[0], d11 * currentColor[1], d11 * currentColor[2]); glVertex2f(x + h, y + h);
glColor3f(d01 * currentColor[0], d01 * currentColor[1], d01 * currentColor[2]); glVertex2f(x, y + h);2.2.2 颜色交互
在get_from_UI函数中,当鼠标按下时,会根据鼠标的位置来设置currentColor。currentColor[0] = (float)mx / win_x;设置的是红色分量,currentColor[1] = (float)my / win_y;设置的是绿色分量,currentColor[2] = 0.5f;设置的是蓝色分量。这样,颜色会随着鼠标的位置变化。
if (mouse_down[0])
{
u[IX(i, j)] = force * (mx - omx);
v[IX(i, j)] = force * (omy - my);
currentColor[0] = (float)mx / win_x;
currentColor[1] = (float)my / win_y;
currentColor[2] = 0.5f;
}currentColor[0] = (float)mx / win_x;:设置当前颜色的红色分量。新的值是鼠标在x方向的位置mx除以窗口宽度win_x。currentColor[1] = (float)my / win_y;:设置当前颜色的绿色分量。新的值是鼠标在y方向的位置my除以窗口高度win_y。currentColor[2] = 0.5f;:设置当前颜色的蓝色分量为0.5。
当鼠标左键被按下时,它会根据鼠标的移动来更新速度场,并根据鼠标的位置来设置当前颜色。
2.2.3 实现效果
实现效果如下:
2.3 障碍设置
2.3.1 障碍定义
首先定义一些障碍需要使用的宏:
#define MIDDLE (N / 2)
#define HOLE1_START (N / 4)
#define HOLE1_END (N / 4 + 5)
#define HOLE2_START (3 * N / 4)
#define HOLE2_END (3 * N / 4 + 5)这些宏定义用于简化代码中的常量表达。具体而言:
MIDDLE:网格的中间行或列索引,即N / 2。HOLE1_START和HOLE1_END:第一个孔洞的起始和结束位置,位于网格的N / 4和N / 4 + 5之间。HOLE2_START和HOLE2_END:第二个孔洞的起始和结束位置,位于网格的3 * N / 4和3 * N / 4 + 5之间。
barrier数组定义:
int* barrier; // 数组表示隔板的位置barrier:一个整型指针,表示一个数组,用于存储每个网格点是否有隔板的位置。数组中的值为1表示有隔板,为0表示没有隔板。
2.3.2 障碍边界条件判定
set_bnd 函数用于设置边界条件。函数的参数为网格大小 N,边界类型 b(用于区分速度场分量的边界条件),以及要处理的数组 x(存储流体的某一物理量,如速度或密度)。我们在其基础上对其增加处理网格中间的隔板的功能。
static void set_bnd(int N, int b, float* x)
{
int i, j;
for (i = 1; i <= N; i++)
{
if (barrier[IX(0, i)] == 0)
x[IX(0, i)] = b == 1 ? -x[IX(1, i)] : x[IX(1, i)];
if (barrier[IX(N + 1, i)] == 0)
x[IX(N + 1, i)] = b == 1 ? -x[IX(N, i)] : x[IX(N, i)];
if (barrier[IX(i, 0)] == 0)
x[IX(i, 0)] = b == 2 ? -x[IX(i, 1)] : x[IX(i, 1)];
if (barrier[IX(i, N + 1)] == 0)
x[IX(i, N + 1)] = b == 2 ? -x[IX(i, N)] : x[IX(i, N)];
// 处理中间隔板位置
if (barrier[IX(i, MIDDLE)] == 1)
{
if (b == 1)
{
x[IX(i, MIDDLE)] = -x[IX(i, MIDDLE + 1)];
}
else if (b == 2)
{
x[IX(i, MIDDLE)] = -x[IX(i, MIDDLE - 1)];
}
else
{
x[IX(i, MIDDLE)] = 0;
}
}
}
// 处理角落的情况
x[IX(0, 0)] = 0.5f * (x[IX(1, 0)] + x[IX(0, 1)]);
x[IX(0, N + 1)] = 0.5f * (x[IX(1, N + 1)] + x[IX(0, N)]);
x[IX(N + 1, 0)] = 0.5f * (x[IX(N, 0)] + x[IX(N + 1, 1)]);
x[IX(N + 1, N + 1)] = 0.5f * (x[IX(N, N + 1)] + x[IX(N + 1, N)]);
}边界处理:
if (barrier[IX(0, i)] == 0)
x[IX(0, i)] = b == 1 ? -x[IX(1, i)] : x[IX(1, i)];
if (barrier[IX(N + 1, i)] == 0)
x[IX(N + 1, i)] = b == 1 ? -x[IX(N, i)] : x[IX(N, i)];
if (barrier[IX(i, 0)] == 0)
x[IX(i, 0)] = b == 2 ? -x[IX(i, 1)] : x[IX(i, 1)];
if (barrier[IX(i, N + 1)] == 0)
x[IX(i, N + 1)] = b == 2 ? -x[IX(i, N)] : x[IX(i, N)];- 当
barrier数组在相应位置为0时,表示此处没有隔板,应用一般的边界条件。 - 对于速度场的分量,
b为1或2时分别处理u和v分量,负号表示反向速度以实现无滑移条件。
处理中间隔板位置:
if (barrier[IX(i, MIDDLE)] == 1)
{
if (b == 1)
{
x[IX(i, MIDDLE)] = -x[IX(i, MIDDLE + 1)];
}
else if (b == 2)
{
x[IX(i, MIDDLE)] = -x[IX(i, MIDDLE - 1)];
}
else
{
x[IX(i, MIDDLE)] = 0;
}
}- 当
barrier数组在相应位置为1时,表示此处有隔板。 - 如果
b == 1,表示处理u分量,将其设为与中间右侧网格点的u分量相反。 - 如果
b == 2,表示处理v分量,将其设为与中间左侧网格点的v分量相反。 - 否则,将中间网格点的值设为
0。
处理角落:
x[IX(0, 0)] = 0.5f * (x[IX(1, 0)] + x[IX(0, 1)]);
x[IX(0, N + 1)] = 0.5f * (x[IX(1, N + 1)] + x[IX(0, N)]);
x[IX(N + 1, 0)] = 0.5f * (x[IX(N, 0)] + x[IX(N + 1, 1)]);
x[IX(N + 1, N + 1)] = 0.5f * (x[IX(N, N + 1)] + x[IX(N + 1, N)]);- 设置角落处的值为相邻两个边界点值的平均值,以确保流体在角落处的连续性。
2.3.3 障碍实现
在流体模拟中,障碍物的实现通过在网格中设置障碍标记来实现。在clear_data 函数中的隔板设置使在中间位置加入带有两个开孔的隔板。
static void clear_data(void)
{
// 其他初始化代码
// ...
// 在中间位置加入隔板,假设有两个开孔
for (i = 0; i <= N + 1; i++)
{
if ((i >= HOLE1_START && i <= HOLE1_END) || (i >= HOLE2_START && i <= HOLE2_END))
{
barrier[IX(i, MIDDLE)] = 0; // 开孔
}
else
{
barrier[IX(i, MIDDLE)] = 1; // 隔板
}
}
}- 这个循环遍历从
0到N+1的所有索引,设置中间行(MIDDLE)的隔板和开孔。 - 对于在
HOLE1_START到HOLE1_END以及HOLE2_START到HOLE2_END范围内的索引,设置barrier[IX(i, MIDDLE)] = 0,表示这些位置是开孔。 - 对于不在上述范围内的索引,设置
barrier[IX(i, MIDDLE)] = 1,表示这些位置是隔板。
通过这种方式,网格的中间位置(MIDDLE 行)将形成一个带有两个开孔的隔板结构。
2.3.4 障碍绘制
draw_barrier 函数实现了绘制带有隔板的流体模拟中的障碍物:
static void draw_barrier(void)
{
int i;
float h = 1.0f / N;
glColor3f(0.7f, 0.7f, 0.7f); // 设置颜色为灰色
glLineWidth(5.0f); // 设置线宽为5.0
glBegin(GL_LINES); // 开始绘制线段
for (i = 0; i <= N; i++)
{
// 如果不在开孔的位置
if (!((i >= HOLE1_START && i <= HOLE1_END) || (i >= HOLE2_START && i <= HOLE2_END)))
{
glVertex2f(i * h, MIDDLE * h - 0.5f * h); // 绘制线段的起点
glVertex2f(i * h, MIDDLE * h + 0.5f * h); // 绘制线段的终点
}
}
glEnd(); // 结束绘制
}glColor3f(0.7f, 0.7f, 0.7f);:设置绘制颜色为灰色。glLineWidth(5.0f);:设置线段的宽度为5.0。glBegin(GL_LINES);:开始绘制线段。- 循环遍历从
0到N的所有索引i,绘制隔板的部分。- 如果
i不在任何一个开孔的范围内,则绘制隔板的线段。 - 隔板的线段起点是
(i * h, MIDDLE * h - 0.5f * h),终点是(i * h, MIDDLE * h + 0.5f * h)。
- 如果
glEnd();:结束绘制线段。
通过这段代码,隔板部分被绘制成一系列的竖直线段,形成一个连续的隔板结构。这样,可以在流体模拟的可视化过程中清晰地展示隔板的位置和形状。
2.3.5 增加上吹风
为了使流体模拟效果更加生动,我们增加了一个向上吹的风的效果。下面是对 vel_step 函数的修改,以实现风的作用:
static void vel_step(int N, float* u, float* v, float* u0, float* v0, float visc, float dt)
{
//...
// 添加风的作用
for (int i = 0; i <= N + 1; i++)
{
for (int j = 0; j <= N + 1; j++)
{
v[IX(i, j)] += 0.001f; // 添加一个向上的速度分量,大小可以调整
}
}
// ...
}- 在
add_source步骤后,我们增加了一个循环,遍历整个网格,并将每个格点的垂直速度分量v增加一个常量值0.001f,表示一个向上的风的作用。你可以根据需要调整风的大小。 - 其余的代码保持不变,仍然执行了原有的流体模拟步骤,包括扩散、投影和平流。这样,风的作用会与其他流体模拟效果结合在一起,形成更加逼真的流体运动效果。
2.3.6 实现效果